Principle of operation
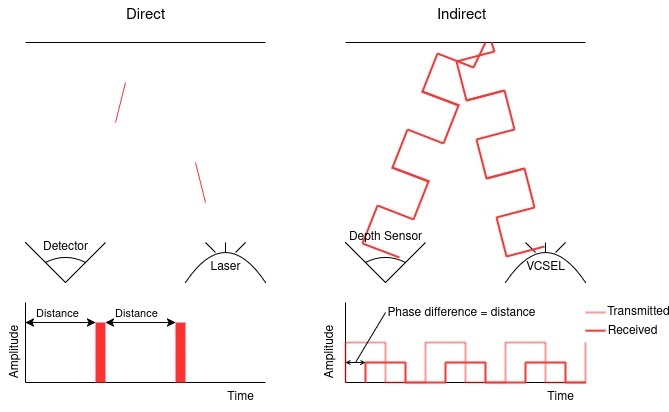
There are two main ways to measure distance using light in Time of Flight. Those are direct and indirect time of flight. Direct time of flight sends a short pulse of light at the target and measures how long it takes for the pulse to return. Indirect time of flight sends out a continuous wave of modulated light. By measuring the phase delay between the transmitted and received modulation, the distance can be worked out according to the following formula:
$$ d = \frac{c \phi}{4 \pi f} $$
where $d$ is the distance to the target, $c$ speed of light, $\phi$ phase shift in radians and $f$ the modulation frequency. As can be gleaned from the formula, the furthest distance that can be measured to depends on modulation frequency. For example filling in 50MHz at maximum phase:
$$ d = \frac{299702547 \cdot 2\pi}{4 \pi \cdot 50000000} = 2.997m$$
yields about three meters. Several methods to increase the range that can be measured with indirect time of flight are discussed here. Under normal circumstances higher modulation frequencies are favoured since any error in phase results in a much smaller error in distance.
How phase delay is measured
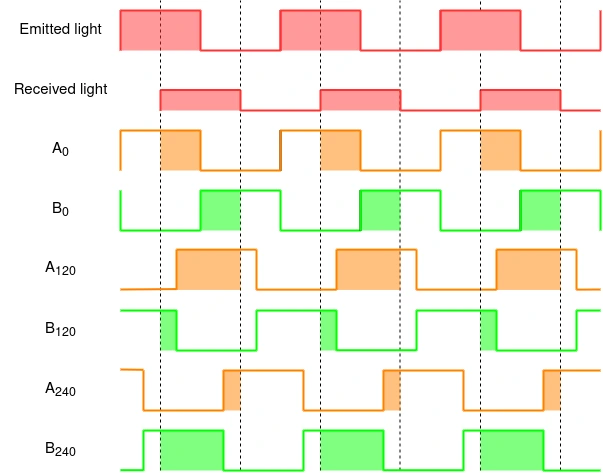
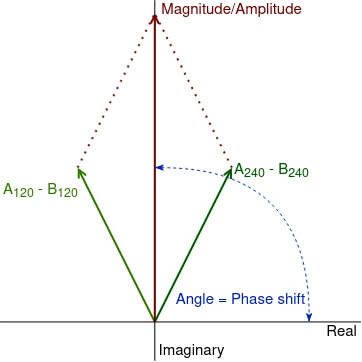
Most depth sensors have two taps or photon wells, tap A and B, which can be opened and closed independently. The taps are opened and closed at the same frequency as the modulation frequency and tap A and B are 180 degree out of phase. When tap A is open, tap B is closed and vice versa. By varying the phase at which tap A and B open and close relative to the light source, multiple lines can be drawn on the complex plane and the distance resolved. The angle of the vector is the phase, which corresponds to distance, and the magnitude is what we at Chronoptics call Amplitude/Intensity.
The difference between tap A and B we call RAW, as in the raw measurement of the sensor. Some sensors also allow to get both A and B readings instead of the difference, we call this RAW_AB. When you combine A and B instead of taking the difference, you get all the light received by the sensor, we call this COMMON. The COMMON information can be useful to see how much background light versus modulated light was received. Background light is automatically filtered out by the sensor, since it takes the difference between the two taps, resulting in only the received modulated light. Therefore ToF can be used in bright light situations, but one has to be careful not to have too long an integration time, otherwise the tap will fill up completely, and then the received modulated light can not be resolved anymore.